Earth drillings for geothermal plants are characterized, among other things, by the use of a borehole liner, which is intended to enable long-term use of the borehole, which is several kilometers deep. For this purpose, after drilling, a casing made of special steel is positioned in the borehole and expanded to allow continuous expansion at maximum inner diameter. The previous method of producing the pipe string using bolted individual pipes involves a high risk of leakage and loss of strength due to the pipe expansion, and is also relatively cost-intensive.
The development of a novel geothermal drilling process [1, 2] aims at 30 percent less costly production of the well casing and a 50 percent reduction in lifetime costs. This process is based on a fusion welding method that ensures more reliable pipe joints in terms of tightness and strength.
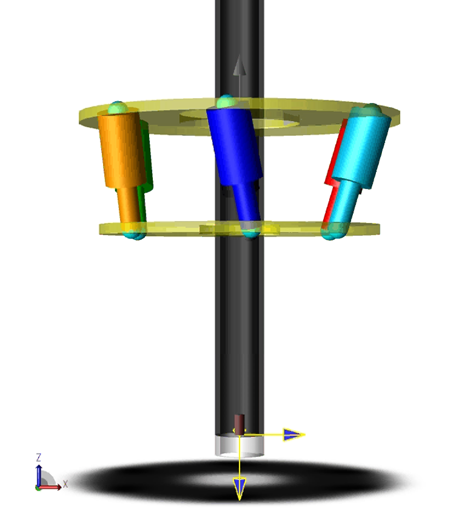
As part of this development project, a welding robot was designed to position the pipe sections (max. diameter: 245 millimeters, max. wall thickness: 25.4 millimeters), which are up to 12 meters long, above the string at a distance of five millimeters, melt each pipe end and press them together with a force of almost 2000 kilonewtons.
The welding process places extremely high demands on the dynamics and accuracy of the welding robot, including the drives to be used and the control system. Due to these requirements and the high cost intensity, which is mainly caused by the high forces and large dimensions of the welding robot, a very high development risk exists.
To minimize the development risk for the welding robot, Hydrive provided support in several development phases with extensive simulation studies. This enabled early correction and validation of the basic concept without having to build a costly and time-consuming functional prototype. Already during the design and construction of the prototype, we were able to optimize control algorithms with respect to real disturbances caused by typical sensors and to develop the corresponding control software. This approach offers a significant reduction of development and commissioning times. It results in a much more mature prototype, which allows our customer to focus more on process optimization and industrialization of the new geothermal drilling process.
[1] D. Brouwer, J. Lehr, B. Denkena, H.-C. Mohring, K. Litwinski:
Positioning system and method for automated alignment and connection of components, Patent WO 2013/086326 A1, 13.06.2013
[2] Federal Ministry for the Environment, Nature Conservation and Nuclear Safety, Project No. 0325073, „Konzept, Entwicklung, Fertigung, und Test eines innovativen und kostengünstigen Geothermie-Verrohrungssystems“