Durch eine konsequente Modularisierung der Steuerungssoftware auf der Basis des IEC 61131 Standards ist es jetzt ohne viel Aufwand möglich, die Softwarefunktionalität auf die verschiedenen Konstruktions- und Ausführungsvarianten des Robotersystems anzupassen. Als Teil einer größeren Automatisierungsanlage sind die Wafer-Handling-Roboter immer an eine Leitsteuerung angeschlossen. Ein übersichtliches Kommunikationsprotokoll ermöglicht eine einfache Kommandierung des Handlers und begrenzt den Programmieraufwand auf der Seite der Leitsteuerung. Als Busprotokolle werden unter anderem EtherCat oder ProfiBus unterstützt.
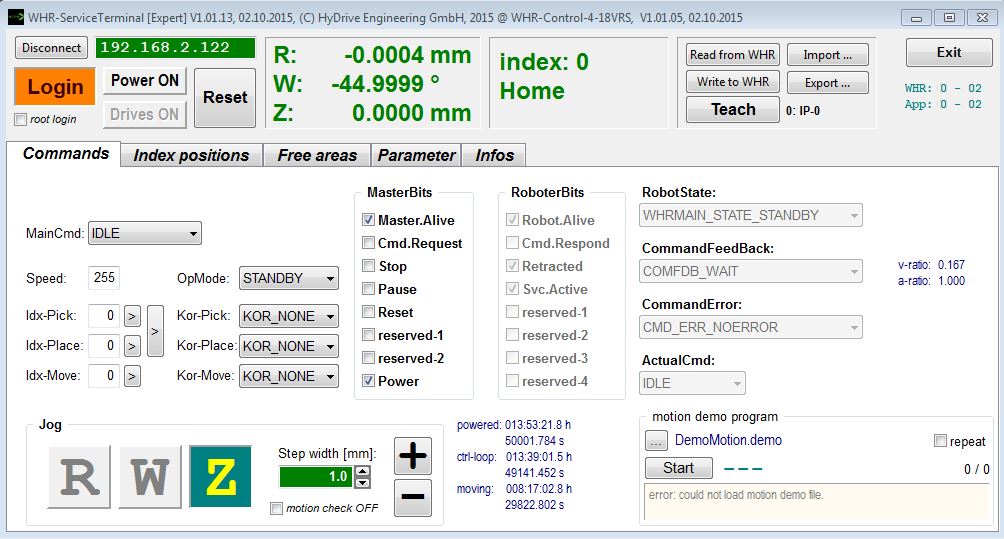
Mit einer einfachen und übersichtlichen Bedienoberfläche können schnell Anpassungen in der Steuerung vorgenommen werden, ohne dabei das Softwareprojekt ändern zu müssen. Als einzelne ausfürbare Datei benötigt das „Service-Terminal“ lediglich einen Windowsrechner mit einer TCP/IP-Verbindung zur Steuerung. Auf ein separates Display kann verzichtet werden.
„Das Serviceterminal ist Klasse – übersichtlich und einfach bedienbar!“ freut sich Uwe Beier nach einer erfolgreichen Inbetriebnahme einer neuen Variante seines Wafer-Handling-Roboters.